
Seho Park
Graduate Research Assistant
sehopark (at) psu (dot) edu


Research Interests: Control, Dynamics, Vehicle Systems, Energy Systems, Model Predictive Control
Education:
- M.S. Mechanical Engineering – Pusan National University (August 2019)
- B.S. Mechanical Engineering – Pusan National University (February 2015)
Research
- Power and thermal management of electrified vehicles
- Lifting linearization for MPC of nonlinear systems
- Timescale separation for multi-timescale systems
- Hierarchical/distributed control for multi-timescale systems
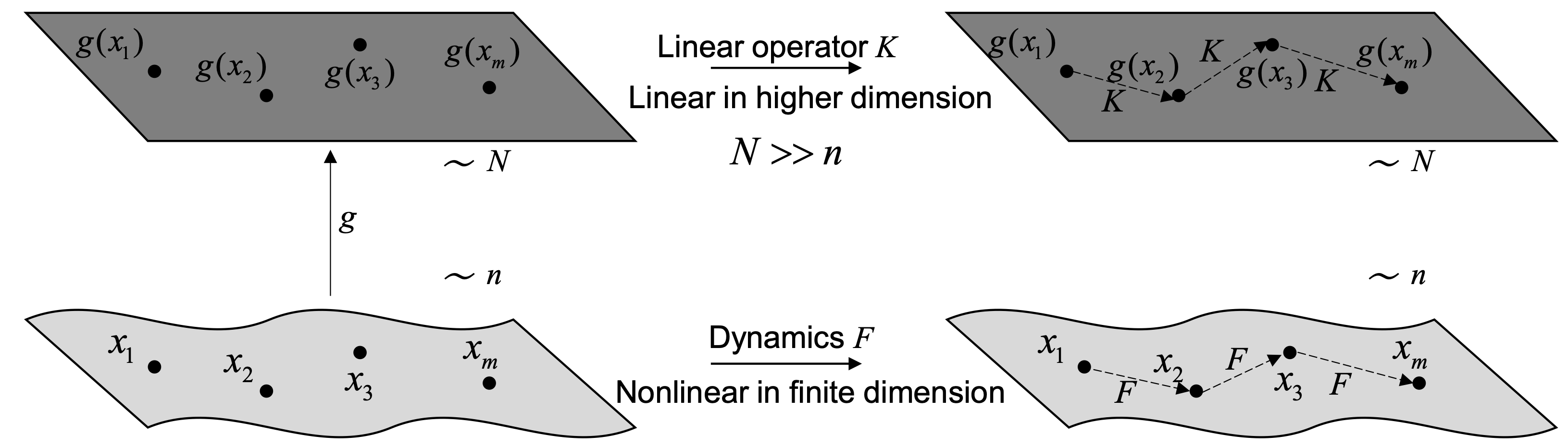
Optimal control problems for nonlinear dynamic systems result in nonconvex formulations, which entail large computational complexity. To reduce computational complexity for real-time implementation, linearization techniques are often applied to produce a linear system that approximates the nonlinear dynamics, with a first-order Taylor series expansion as the most common approach. However, Taylor series linearization typically has large error when the states are far from a fixed linearization point. On the other hand, lifting linearization methods provide a global linearization that can approximate nonlinear dynamics more accurately by using augmented states to capture nonlinear terms, as shown in Fig. 1.
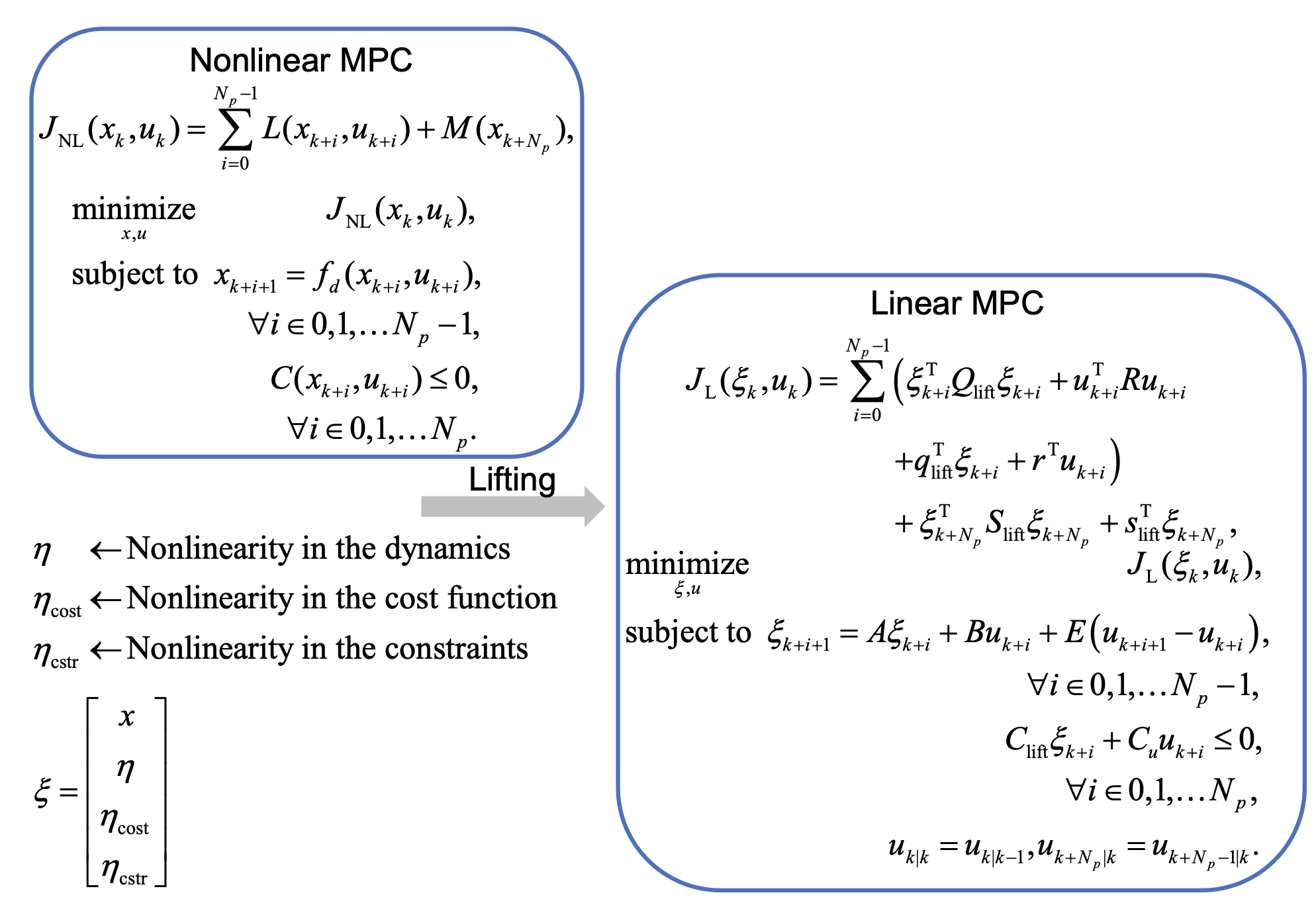
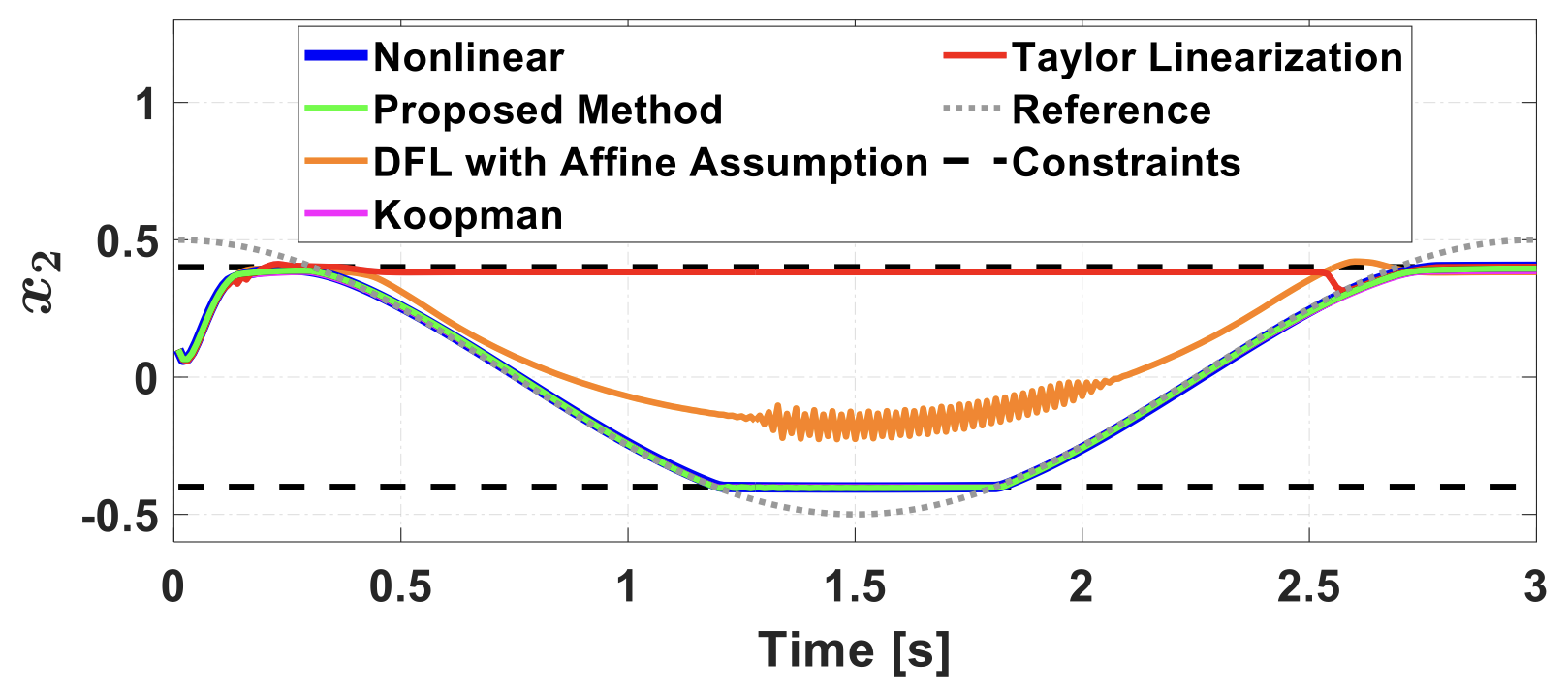
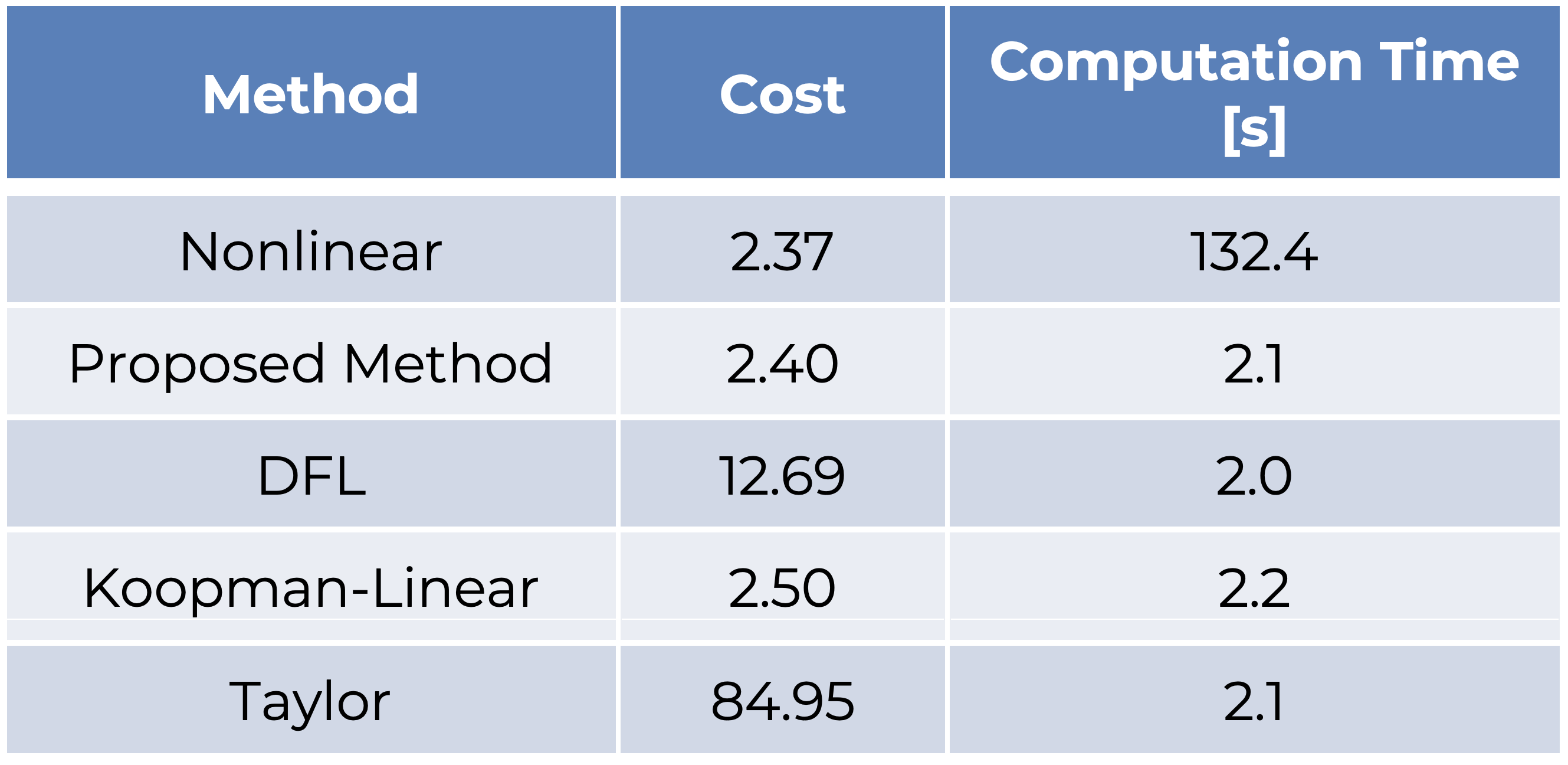
Given nonlinear dynamics, the proposed method approximates these as linear dynamics with an augmented state and noncausal term. Although the approximated dynamics are noncausal, the formulation is linear and can be used for prediction in linear model predictive control (MPC) with additional constraints as shown in Fig. 2. Figure 3 and Table 1 show numerical simulation results of nonlinear MPC and linear MPC with several linearization methods. The proposed method performs similar to nonlinear MPC at a fraction of the computation time.
Research by Seho Park, Ph.D. Student:
Most of the energy consumed by a hybrid electric vehicle (HEV) comes from fuel. The battery is used to improve efficiency of both propulsion and auxiliary loads like air-conditioning. The lifespan of the battery has a major impact on the cradle-to-grave sustainability and cost of the vehicle. Fig. 1 shows how one type of battery degradation, called SEI growth rate, varies as a function of current, state-of-charge (SOC), and temperature. However, most strategies for power management of HEVs focus on maximizing fuel economy without explicitly considering the impacts of control decisions on battery health. Therefore, this research develops a framework for integrated power and thermal management of HEVs that explicitly manages tradeoffs between fuel economy and battery degradation.
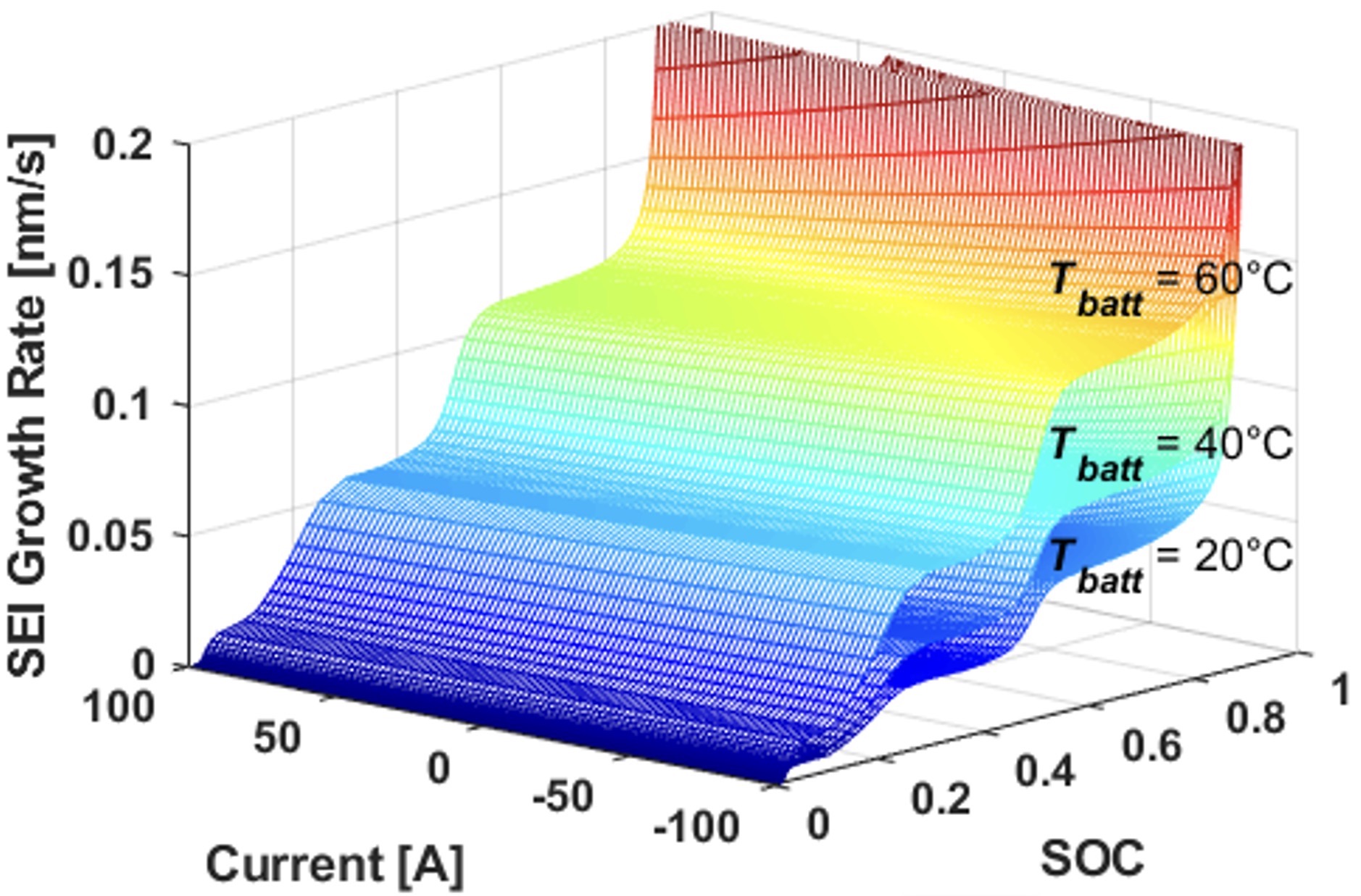
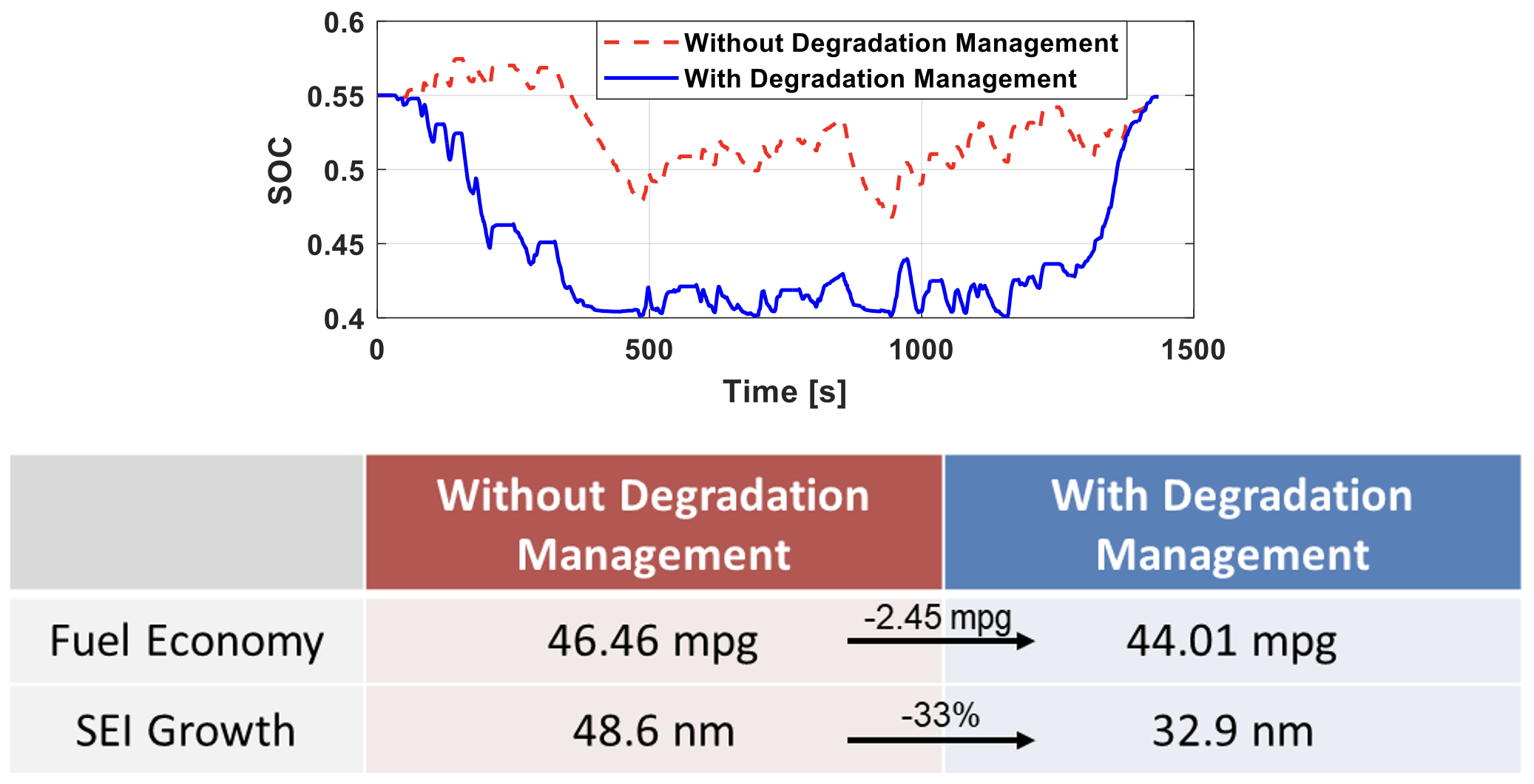
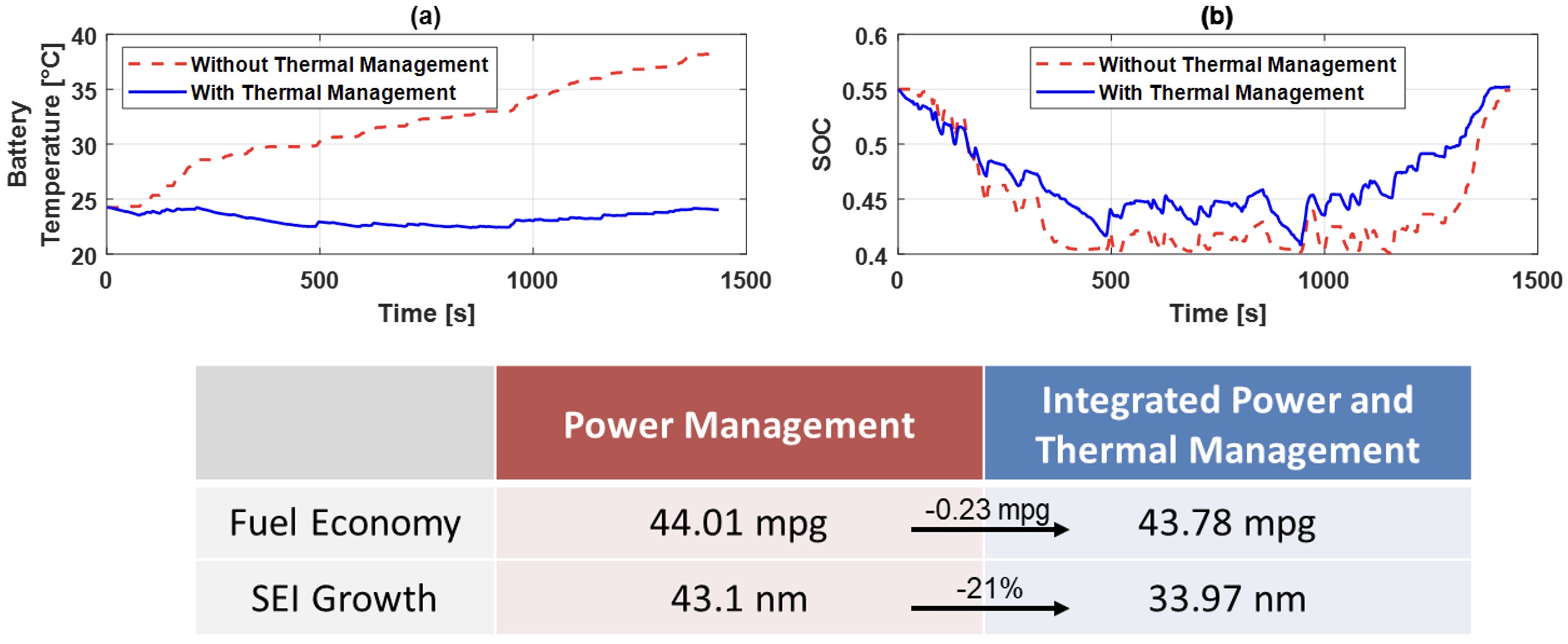
Fig. 2 compares controllers with and without degradation management over a simulated drive cycle. The former allows explicit tradeoffs between battery degradation and fuel economy to be made in maximizing the overall sustainability of the vehicle. Fig. 3 shows that also considering battery thermal management in the controller allows the battery degradation to be decreased by 21% at the cost of 0.23 mpg fuel consumption. Thus, integrating thermal management into the controller can greatly improve battery lifespan with a small impact on fuel economy.
consideration of battery degradation
(both cases consider battery degradation)
Publications
- Yin Yu, Daning Huang, Seho Park, and Herschel C. Pangborn, "Learning Networked Dynamical System Models with Weak Form and Graph Neural Networks," Journal of Guidance, Control, and Dynamics, 2026. (accepted) [arXiv]
- Seho Park and Herschel C. Pangborn, "Multi-timescale System Separation via Data-driven Identification Within a Singular Perturbation Framework," 2024 American Control Conference, 2024.
- Seho Park and Herschel C. Pangborn, "Lifted Graph-based Modeling for Linear Predictive Control of Nonlinear Energy Systems," IEEE Conference on Control Technology and Applications, 2023, doi: 10.1109/CCTA54093.2023.10252310.
- Yin Yu, Seho Park, Daning Huang, and Herschel C. Pangborn, “Towards Automated Timescale Decomposition for Graph-based Hierarchical Control of Electrified Aircraft Systems,” AIAA Aviation, 2023, doi: 10.2514/6.2023-4509.
- Seho Park and Herschel C. Pangborn, “Noncausal Lifting Linearization for Nonlinear Dynamic Systems Under Model Predictive Control,” IEEE Conference on Decision and Control, 2022, doi: 10.1109/CDC51059.2022.9993081.
- Seho Park and Herschel C. Pangborn, "Power and Thermal Management with Battery Degradation for Hybrid Electric Vehicles," 2021 IEEE Conference on Control Technology and Applications, 2021, pp. 832-838, doi: 10.1109/CCTA48906.2021.9659119.
- Seho Park and Changsun Ahn, "Model Predictive Control with Stochastically Approximated Cost-To-Go for Battery Cooling System of Electric Vehicles," IEEE Transactions on Vehicular Technology, vol. 70, no.5, pp. 4312-4323, May 1, 2021. doi: 10.1109/TVT.2021.3073126.
- Seho Park and Changsun Ahn, "Computationally Efficient Stochastic Model Predictive Controller for Battery Thermal Management of Electric Vehicle," IEEE Transactions on Vehicular Technology, vol. 69, no.8, pp. 8407-8419, August 1, 2020. doi:10.1109/TVT.2020.2999939.
- Seho Park and Changsun Ahn, "Power Management Controller for a Hybrid Electric Vehicle With Predicted Future Acceleration," IEEE Transactions on Vehicular Technology, vol. 68, no.11, pp. 10477-10488, 2019. doi:10.1109/TVT.2019.2939344.
- Seho Park and Changsun Ahn, "Stochastic Model Predictive Controller for Battery Thermal Management of Electric Vehicles," 2019 IEEE Vehicle Power and Propulsion Conference, 2019, pp. 1-5, doi: 10.1109/VPPC46532.2019.8952340.
- Seho Park and Changsun Ahn, "HEV Power Management Algorithm using Future Acceleration Predicted by DNN "in International Symposium on Advanced Vehicle Control, Beijing, China, July 16-20, 2018.

